蔚小理智驾新战役:端到端技术架构成香饽饽
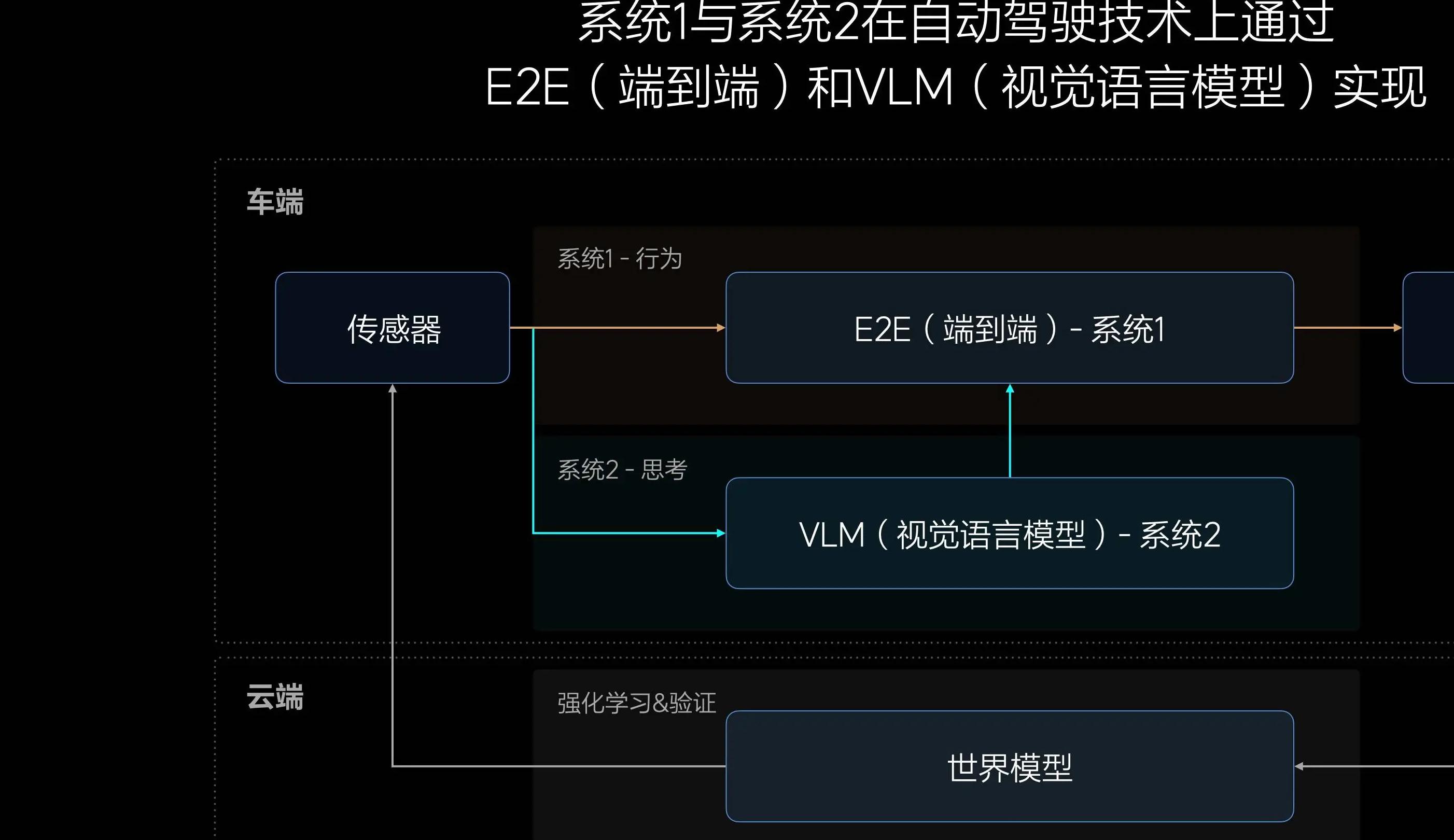
无独有偶,7月5日的2024智能驾驶夏季发布会,理想汽车发布了基于端到端模型、VLM视觉语言模型和世界模型的全新自动驾驶技术架构,并开启新架构的早鸟计划。
7月27日的NIO IN 2024 蔚来创新科技日上,蔚来智能驾驶技术架构 .0发布。蔚来称,.0 在算法层升级为引入世界模型的端到端架构,直接从原始传感器数据生成驾驶决策,减少传统方案中的信息损耗。
从周销量争议,到”端到端“竞速,蔚小理的新“战役”在智驾打响。
端到端成为香饽饽
被蔚小理竞逐的“端到端”并不是新概念。
今年3月,特斯拉FSD V12.3推出,解决复杂场景能力大幅提升,在这一版本的FSD上,特斯拉应用了端到端大模型。随着特斯拉FSD进入中国市场的倒计时吹响,这使得“端到端”技术路线火热起来,进入更多人视野之中。
小鹏汽车成为国内最快拥抱端到端的造车新势力。今年5月20日,小鹏汽车官宣已发布了国内首个量产上车的端到端大模型:神经网络XNet+规控大模型+大语言模型。
“小鹏汽车成为全球唯二实现端到端大模型量产落地的车企。”小鹏汽车在此次AI智驾技术发布会上表示。何小鹏认为,在端到端大模型的助力下,小鹏智驾技术和体验的进化周期大幅缩短,今年7月XNGP即可开放至全国所有城市,小鹏汽车OTA更新实现了“每2天一次版本迭代,每2周一次体验升级”。
何小鹏称得上是端到端的坚实拥趸者。今年6月,何小鹏远赴*,体验了上述特斯拉最新版本的FSD智驾。“全程体验下来,FSD的表现还是很丝滑的。绝大部分路况处理都让我很安心,很像人类司机驾驶。”何小鹏表示。
7月25日,何小鹏再度发文称:“今年的FSD和以前的Tesla自动驾驶从能力上完全是两个,我非常赞赏。最近和好几个L4的老大聊端到端,他们都认为端到端是L2或者L3的最佳路线,但是一定不是L4的优选。我是真的认为端到端➕大模型会最终到L4。”
他称:“我越来越坚信端到端+大模型的组合,可以解决L2-L4的软件架构,但是也的确需要更大算力和相关硬件的变化配合。而且端到端是真正可以全球化的,是真正可以到小区和所有内部道路自动驾驶的最优解决方案。”
让何小鹏备受推崇的端到端是什么?
端到端模型用于处理常规的驾驶行为,从传感器输入到行驶轨迹输出只经过一个模型,信息传递、推理计算和模型迭代更高效,驾驶行为更拟人。
根据开源证券,相比传统的感知、规控等模块拼接而成的模块化算法,端到端算法采用整体化的神经网络,模型的一端输入感知信息,另一端直接输出轨迹或者控制信号。
据辰韬资本联合多家单位发布的2024年度《端到端自动驾驶行业研究报告》(下称“《报告》”),自动驾驶的很多长尾场景是“只可意会,不可言传”的,意即对于人类驾驶来说可以靠直觉“搞定”,但很难用规则化的语言来表述,这类问题是传统技术路径依赖的专家系统很难解决的。这类需要复杂环境理解能力的场景,要么很难用规则准确描述,要么其开发工程量太大(因为专家无法总结所有规律)。这类场景对于端到端系统来说,可以被训练为隐式的中间表示,从实践上表现出很强的应对能力。相比之下,端到端系统能够表现得更像人类司机,这有利于自动驾驶系统与用户建立信任。
在《报告》访谈的30余位自动驾驶行业一线专家中,90%表示自己所供职的公司已投入研发端到端技术,大部分技术公司都认为难以承受错过这一次技术*的后果。
蔚小理开启智驾竞赛
“‘端到端’加持下,XNGP具有更强的学*能力,能够处理更复杂的道路情况,这在规则时代这是难以实现的。”何小鹏放话:“没有使用大模型的智驾都将被淘汰。”
在端到端技术成为较明确的智驾演进趋势这一背景下,老对手蔚小理再度围绕端到端、大模型等在智驾领域开始“贴身肉搏”。
根据36氪汽车7月17日报道,理想汽车近期成立了“端到端自动驾驶”的实体组织,整体200人出头。7月5日,理想汽车发布了基于端到端模型、VLM视觉语言模型和世界模型的全新自动驾驶技术架构。
- 标签:




